Back to Course
Quarky를 사용한 로보틱스 및 AI - 레벨 2
0% Complete
0/0 Steps
-
로봇 공학의 기초수업 1: 로봇 공학 소개3 Topics
-
수업 2: 센서의 기초4 Topics|1 Quiz
-
수업 3: 액추에이터의 기초6 Topics|1 Quiz
-
수업 4: 로봇을 사용한 얼굴 추적2 Topics
-
자율주행 로봇수업 5: 장애물 회피 로봇4 Topics|1 Quiz
-
수업 6: 가장자리 감지 로봇5 Topics|1 Quiz
-
수업 7: 자동 조종 로봇5 Topics|1 Quiz
-
실생활 AI 및 로봇 공학수업 8: 4륜구동 로봇3 Topics
-
수업 9: 객체 추적 로봇5 Topics|1 Quiz
-
수업 10: 픽 앤 플레이스 로봇 - 조립2 Topics
-
수업 11: 픽 앤 플레이스 로봇3 Topics
-
캡스톤 프로젝트수업 12: 캡스톤 프로젝트
Lesson 6, Topic 3
In Progress
논리 및 순서도
Lesson Progress
0% Complete
에지 감지 로직
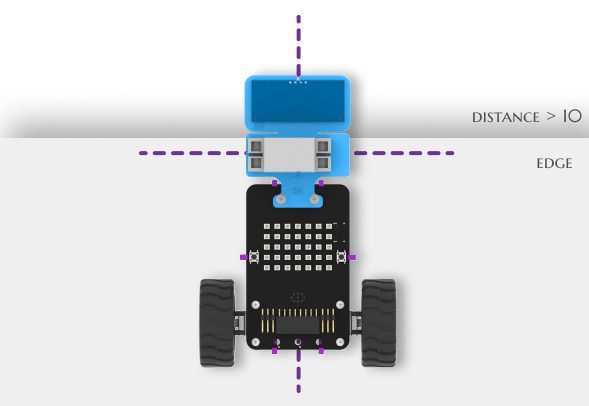
떨어지는 것을 방지하기 위해 로봇은 센서와 표면 사이의 거리를 계산하여 가장자리를 감지할 때마다 경로를 변경합니다. 거리가 10cm 이상이면 가장자리가 감지되었음을 의미하고 결과적으로 로봇이 다른 방향으로 이동합니다.
로그인을 자세히 살펴보겠습니다.
- 우리의 가장자리 감지는 초음파 센서와 표면 사이의 거리가 10cm 미만이어야 할 때마다 앞으로 이동합니다.

- 초음파 센서와 표면 사이의 거리가 10cm 이상일 때 Edge가 감지됩니다. 로봇이 가장자리 감지를 중지합니다.
- 초음파 헤드를 왼쪽으로 돌려 왼쪽에 엣지가 있는지 없는지 확인합니다.

- 왼쪽에 가장자리가 없으면 Quarky는 왼쪽으로 90도 회전하여 방향을 왼쪽으로 변경합니다. 초음파 머리는 똑바로 얻을 것입니다. 그리고 로봇은 앞으로 나아갑니다.

- 왼쪽에 에지가 감지되면 초음파 헤드가 오른쪽으로 회전합니다.

- 가장자리가 감지되지 않으면 Quarky는 우회전하여 방향을 오른쪽으로 바꿉니다. 초음파 머리는 똑바로 얻을 것입니다. 그리고 앞으로 나아갑니다.
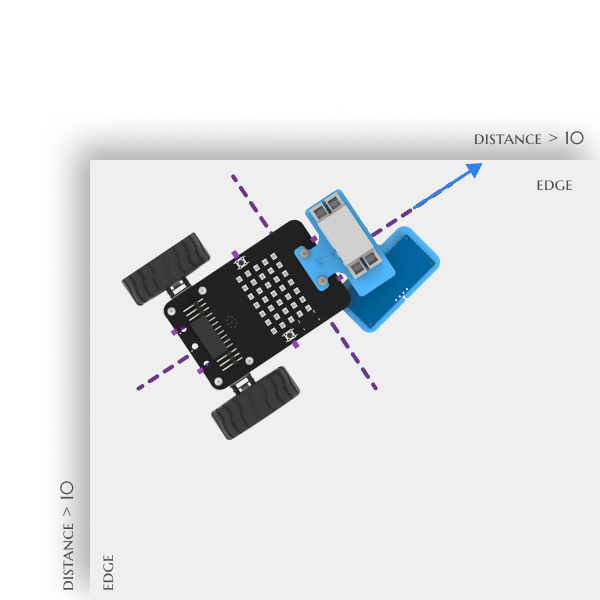
- 모든 방향에서 가장자리를 감지하는 경우. Quarky는 뒤로 이동합니다.

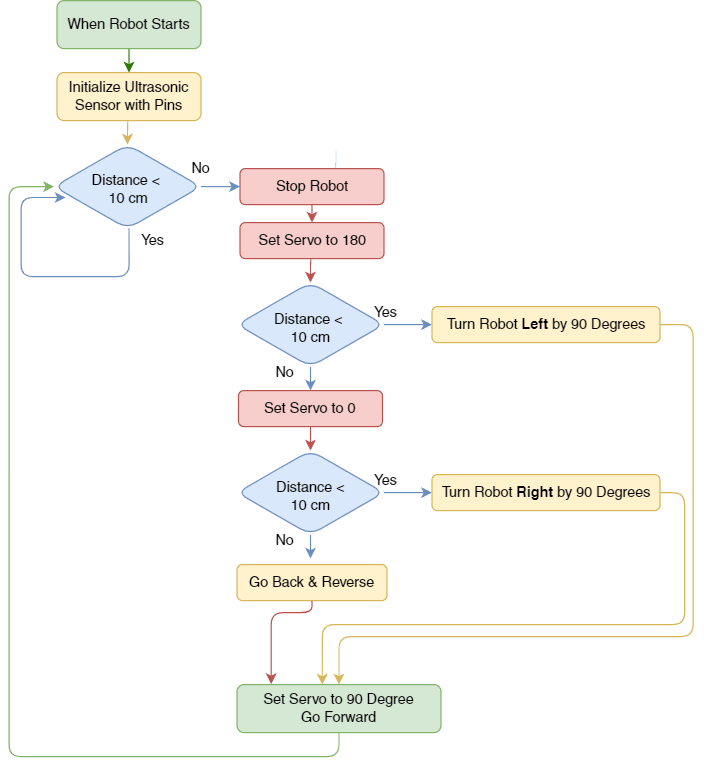
순서도
아래는 로직의 순서도 표현입니다. 다음 항목에서 로봇에 대한 스크립트를 작성할 것입니다.