
지금까지 초음파 센서에 대해 알아보고 장애물 회피 로봇을 조립했습니다.

여기에서는 초음파 센서와 Quarky를 사용하여 대상과의 거리를 측정하는 방법에 대해 알아봅니다. 따라서 우리의 다음 작업은 이들을 연결하고 거리 측정을 위한 코드를 작성하는 것입니다.
사이
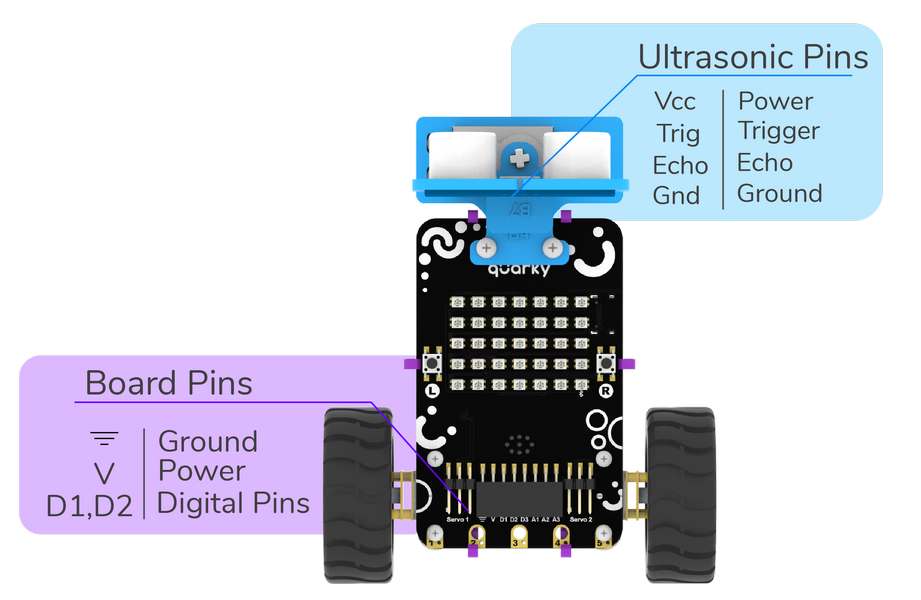
이제 초음파 센서를 로봇에 연결하겠습니다. 센서와 로봇에는 다음과 같은 핀이 있습니다.
- 초음파 센서 핀:
- VCC
- GND
- Trig
- Echo
- 쿼키 핀:
- GND
- V
- D1
- D2
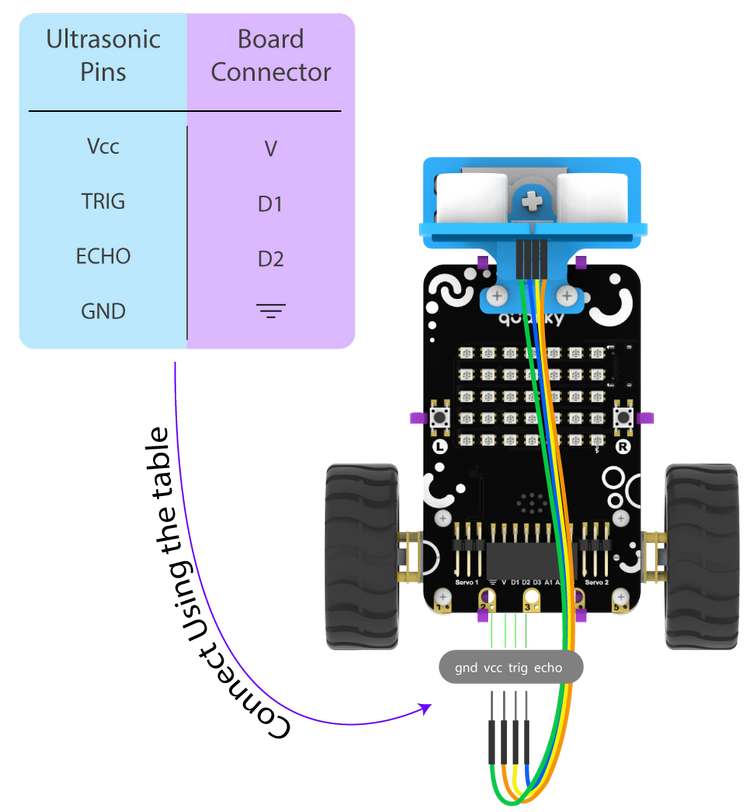
키트에 제공된 4세트 와이어를 사용하여 Quarky와 초음파 센서를 연결하는 것부터 시작합니다. 그러나 먼저 다음과 같은 방법으로 연결하십시오.
- 먼저 Quarky의 V 핀에 초음파 센서의 VCC를 연결합니다.
- 초음파 센서의 GND를 Quarky의 접지 핀에 연결합니다 .
- 초음파 센서의 Trig를 Quarky의 D1 핀에 연결합니다.
- 마지막으로 초음파 센서의 Echo를 Quarky의 D2 핀에 연결합니다.

Quarky를 PictoBlox에 연결
먼저 Quarky를 PictoBlox에 연결하는 것으로 시작하겠습니다. 그런 다음 원하는 유형의 장치를 선택하고 지침을 따르십시오.
데스크톱
Quarky와 함께 작업하려면 다음 두 가지 방법으로 Quarky를 PictoBlox에 연결할 수 있습니다.
- USB-C 케이블 사용.
- 블루투스 사용. PictoBlox에서 Bluetooth로 작업하려면 먼저 여기에서 다운로드할 수 있는 Scratch 링크를 다운로드하여 설치해야 합니다.
Bluetooth를 사용하여 Quarky를 PictoBlox에 연결하려면 아래 단계를 따르십시오.
- 먼저 Quarky의 전원을 켭니다.
- PictoBlox 링크를 시작하십시오.
- 데스크탑에서 PictoBlox를 여십시오.
- 그런 다음 코딩 환경으로 Block Coding을 선택합니다.

- 그런 다음 도구 모음에서 Board 버튼을 클릭하고 보드를 Quarky로 선택합니다.

- 다음으로 Connect 버튼을 클릭합니다. Bluetooth를 사용하여 Quarky를 PictoBlox에 연결합니다. 따라서 나타나는 대화 상자에서 Bluetooth Port를 클릭한 다음 목록에서 해당 포트를 선택하여 Quarky에 연결하십시오.

짜잔! 이제 Quarky가 PictoBlox에 연결되었습니다.
이동하는
Quarky를 PictoBlox에 연결하려면 아래 단계를 따르십시오.
- 먼저 Quarky의 전원을 켭니다.
- 스마트폰에서 PictoBlox를 엽니다. 내 공간으로 이동하여 오른쪽 하단의 ‘+(plus)’ 버튼을 클릭하여 새 프로젝트를 수행합니다.

- 그런 다음 도구 모음의 오른쪽 상단 모서리에 있는 Board 버튼을 누릅니다.

- Quarky로 board를 선택합니다.

- 그런 다음 Connect 버튼을 탭합니다.

- 목록에서 Bluetooth 모듈의 이름을 선택하십시오.
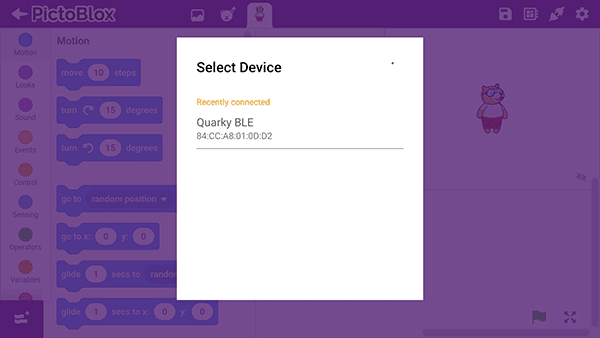
짜잔! 이제 Quarky가 PictoBlox에 연결되었습니다. 이제 PictoBlox에서 Quarky 매트릭스에 표현식을 표시하는 스크립트를 만들어 봅시다!
초음파 센서 블록
.센서 PictoBlox의 팔레트를 사용하면 초음파 센서 블록을 활용할 수 있습니다. 동일한 두 개의 블록이 있습니다.
- Connect Ultrasonic () to trig (), echo(): 이 블록은 초음파 핀의 초기화를 수행하는 데 사용됩니다. 트리거 핀이 D1에 연결되고 Echo 핀이 D2 핀에 연결되어 있음을 보여줍니다.

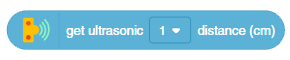
- Get Ultrasonic () distance: 이 블록은 거리 값(cm)을 얻거나 보는 데 사용됩니다.
활동: 초음파 센서로부터의 거리 읽기
거리 측정은 다음과 같이 작동합니다. 물체가 센서 앞에 오면 물체와 Quarky 사이의 거리를 볼 수 있습니다.

재미있나요? 그럼 코딩을 해보자!
코딩하자!
다음 단계를 따르십시오.
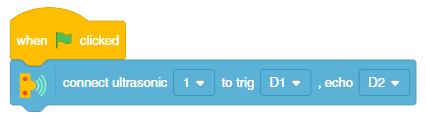
- Events 팔레트로 이동하여 when green flag clicked 블록을 추가하십시오 ..
- 핀을 초기화하려면 Sensors 팔레트로 이동하여 초록색 깃발을 클릭했을 때 아래의 trig(), echo()에 Connect Ultrasonic()을 추가합니다.
- 이제 Control 팔레트로 이동하여 Connect Ultrasonic() to trig(), echo() 아래에 forever 블록을 추가합니다.. 이 블록 내부의 모든 항목은 코드를 수동으로 중지할 때까지 실행됩니다.
- looks 팔레트의 say() 블록을 forever 블록에 추가합니다 ..
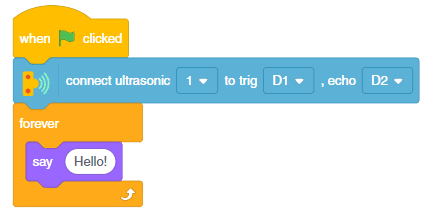
- 마지막으로 Sensors 팔레트에서 Get ultrasonic() distance를 드래그하여 say() 블록에 놓습니다. 이렇게 하면 코드를 실행할 때마다 Toby가 거리 값을 말할 수 있습니다.
코드 완성!!

그러나 우리의 임무는 아직 끝나지 않았습니다. 그럼 작동을 확인하기 위해 테스트해 봅시다.
최종 테스트
먼저 센서 앞에 물체를 놓고 거리를 측정합니다.
Toby는 거리 값을 말할 것입니다. 손이 센서에 접근하면 값이 감소하고 멀어지면 증가합니다.
