
Back to Course
Quarky를 사용한 로보틱스 및 AI - 레벨 2
0% Complete
0/0 Steps
-
로봇 공학의 기초수업 1: 로봇 공학 소개3 Topics
-
수업 2: 센서의 기초4 Topics|1 Quiz
-
수업 3: 액추에이터의 기초6 Topics|1 Quiz
-
수업 4: 로봇을 사용한 얼굴 추적2 Topics
-
자율주행 로봇수업 5: 장애물 회피 로봇4 Topics|1 Quiz
-
수업 6: 가장자리 감지 로봇5 Topics|1 Quiz
-
수업 7: 자동 조종 로봇5 Topics|1 Quiz
-
실생활 AI 및 로봇 공학수업 8: 4륜구동 로봇3 Topics
-
수업 9: 객체 추적 로봇5 Topics|1 Quiz
-
수업 10: 픽 앤 플레이스 로봇 - 조립2 Topics
-
수업 11: 픽 앤 플레이스 로봇3 Topics
-
캡스톤 프로젝트수업 12: 캡스톤 프로젝트
Lesson 8, Topic 1
In Progress
4륜구동 로봇 – 조립
Lesson Progress
0% Complete
로봇 조립

먼저 활동을 진행하기 전에 수직 조향 로봇을 조립하는 방법을 살펴보겠습니다.
수평 로봇부터 시작하겠습니다.

- 먼저 볼트를 제거하여 Quarky 로봇에서 캐스터 휠을 분리합니다 .

- 모터 장착 브래킷을 사용하여 B1 플레이트 상단에 모터를 놓습니다 . 모터 와 함께 제공되는 M2 볼트와 M2 너트를 사용하여 고정합니다 .
 참고 : 모터가 적절하게 장착되었는지 확인해야 합니다.
참고 : 모터가 적절하게 장착되었는지 확인해야 합니다.
 참고 : 모터의 반대쪽에 B1이 쓰여 있는지 확인하십시오.
참고 : 모터의 반대쪽에 B1이 쓰여 있는지 확인하십시오.
- 이제 휠을 모터에 부착합니다 .

- 그런 다음 로봇 앞에 바퀴 하위 어셈블리(바퀴 포함)를 부착합니다 . M2.5 너트와 볼트를 사용하여 고정합니다.

- 로봇에 전화를 걸려면 두 개의 A3 링크를 로봇에 장착 하고 부드럽게 끼웁니다 .
- A4 링크를 사용하여 A3 링크를 잠급니다 .

기계적 조립이 완료되었습니다.
모터 연결
모터 연결은 스티어링 로봇과 유사합니다.

두 개의 왼쪽 모터를 연결한 다음 와이어를 보드에 연결합니다. 올바른 모터에 대해 동일한 작업을 수행합니다.
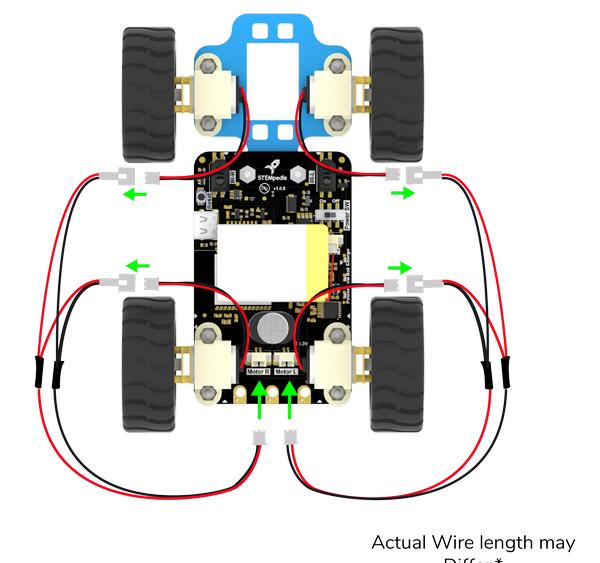
연결은 그림에 나와 있습니다.
우리 로봇이 준비되었습니다.