
Back to Course
Quarky를 사용한 로보틱스 및 AI - 레벨 2
0% Complete
0/0 Steps
-
로봇 공학의 기초수업 1: 로봇 공학 소개3 Topics
-
수업 2: 센서의 기초4 Topics|1 Quiz
-
수업 3: 액추에이터의 기초6 Topics|1 Quiz
-
수업 4: 로봇을 사용한 얼굴 추적2 Topics
-
자율주행 로봇수업 5: 장애물 회피 로봇4 Topics|1 Quiz
-
수업 6: 가장자리 감지 로봇5 Topics|1 Quiz
-
수업 7: 자동 조종 로봇5 Topics|1 Quiz
-
실생활 AI 및 로봇 공학수업 8: 4륜구동 로봇3 Topics
-
수업 9: 객체 추적 로봇5 Topics|1 Quiz
-
수업 10: 픽 앤 플레이스 로봇 - 조립2 Topics
-
수업 11: 픽 앤 플레이스 로봇3 Topics
-
캡스톤 프로젝트수업 12: 캡스톤 프로젝트
Lesson 7, Topic 3
In Progress
활동 1: 수동 조종 로봇
Lesson Progress
0% Complete
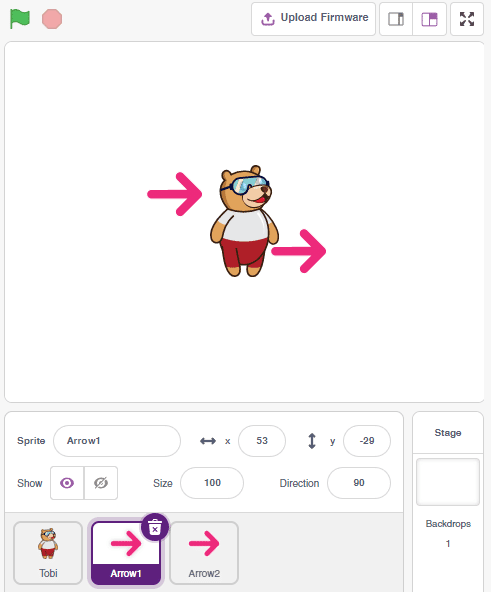
수동 제어 로봇
수동 제어 스티어링 로봇은 앞뒤로 이동할 수 있으며 화살표 스프라이트를 사용하여 방향을 왼쪽, 오른쪽 또는 중앙으로 조정하여 스티어링을 제어할 수도 있습니다.
이제 스티어링 로봇의 스크립트를 만들어 봅시다!
무대 설정
- 스프라이트 라이브러리에서 세 개의 Arrow 스프라이트를 스테이지에 추가합니다.
- Arrow 스프라이트의 이름을 Left, Right 및 Straight로 변경합니다.
- Straight 스프라이트를 클릭하고 스크립트를 추가하여 0, 0 위치로 이동하고 0도를 가리키고 크기를 200%로 설정합니다.
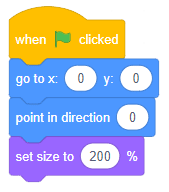
- set servo on () to () angle 블록을 추가하고 각도를 90도로 설정합니다. 이것은 코드가 시작될 때 조향 로봇을 똑바로 설정합니다.

- Left 스프라이트를 클릭하고 스크립트를 추가하여 -150, 0 위치( Motion 팔레트로 이동), -90도(왼쪽 방향)를 가리키고 크기를 200%로 설정합니다.

- Right 스프라이트를 클릭하고 스크립트를 추가하여 150, 0 위치로 이동하고 90도(오른쪽 방향)를 가리키고 크기를 200%로 설정합니다 .

- 마지막으로 녹색 깃발을 클릭하여 무대를 설정합니다.

조향 제어
조향 로봇의 제어 각도는 다음과 같습니다.
- 직선 – 90도
- 왼쪽 – 130도
- 오른쪽– 40도
코드를 작성해 보겠습니다.
Straight 스프라이트
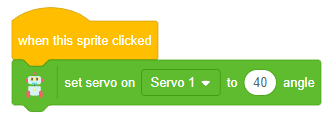
- Straight 스프라이트를 클릭하고 Control 팔레트에서 when the sprite is clicked 블록을 추가합니다. 직선 화살표를 클릭하면 스크립트가 시작됩니다.
- set servo on () to () angle 블록을 추가하고 각도를 90도로 설정합니다.

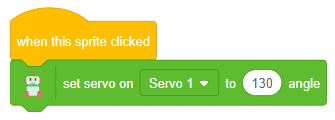
Left 스프라이트
Left 스프라이트를 클릭하고 직선과 유사한 코드를 추가합니다. 이번에는 각도를 130도로 설정합니다.
Right 스프라이트
Right 스프라이트를 클릭하고 직선과 유사한 코드를 추가합니다. 이번에는 각도를 40도로 설정합니다.
전후 운동
- Straight 스프라이트와 메인 스크립트로 시작하세요.
- 로봇 팔레트에서 set robot orientation as () 블록을 넣습니다. 드롭다운에서 방향을 vertical로 선택합니다.
- Control 팔레트에서 forever 블록을 배치합니다.
- 이제 Control 팔레트의 if () else 블록을 forever 블록 안에 추가합니다.
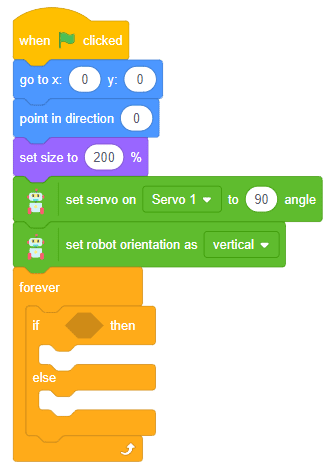
- 그런 다음 Sensing 팔레트에서 key () pressed 블록을 if-else 블록의 공간에 넣습니다.
- 키를 up 화살표로 설정합니다. 이 명령문은 위쪽 화살표 키를 눌렀는지 여부를 확인합니다.
- 다음으로 Robot 팔레트의 if 분기 내부에 go() at () % speed를 끌어다 놓습니다. 방향을 100% 속도로 정방향으로 설정합니다.

- 이제 이 전체 if () else 블록을 복제하여 이전 else 분기 안에 넣습니다.
- 이번에는 down 화살표 키의 조건을 확인합니다. 따라서 ‘key() pressed’ 블록에서 키를 down 화살표로 변경합니다.
- 그 후, go () at () % speed 블록에서 역방향으로 방향을 바꾼다.
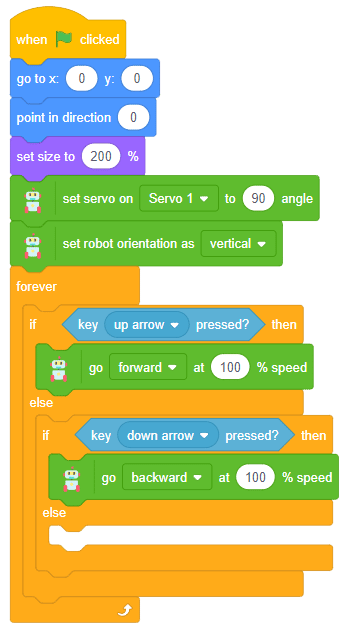
- 그런 다음 Robot 팔레트의 stop robot을 else 분기 안에 놓습니다.

스크립트가 완료되었습니다.
로봇으로 코드를 테스트합니다.
테스트

보시다시피 이 로봇에서는 스테이지 화살표 스프라이트를 클릭하여 조종을 제어할 수 있습니다. 이 화살표는 오른쪽, 왼쪽 및 중앙에서 로봇의 방향을 변경할 수 있습니다.
또 다른 것은 각도를 변경하여 원형 운동으로 로봇을 움직일 수 있다는 것입니다.

과제
다음 수업으로 넘어가기 전에 작은 과제가 기다리고 있습니다!
활동에서 생성한 프로젝트를 과제로 제출합니다.
과정을 마친 후 수료증을 받으려면 과제를 제출해야 합니다.
과제를 업로드하려면 아래 단계를 따르세요.
- Choose File을 클릭합니다.
- 열리는 팝업 창에서 이미지를 선택합니다.
- 이미지가 선택되면 Upload Assignment를 클릭합니다.

허용되는 파일 유형은 PictoBlox 프로그램에서 생성된 SB3입니다. 허용되는 최대 파일 크기는 15MB입니다.
행운을 빕니다!