
Back to Course
Quarky를 사용한 로보틱스 및 AI - 레벨 1
0% Complete
0/0 Steps
-
시작하기수업 1: 쿼키 로봇과 인사하세요!5 Topics|1 Quiz
-
로봇공학수업 2: 로봇과 함께하는 재미3 Topics|1 Quiz
-
수업 3: 무선 제어 로봇3 Topics
-
수업 4: 라인 추적 센서2 Topics
-
수업 5: 로봇을 따라가는 라인3 Topics|1 Quiz
-
현실 세계에서 활용 학습수업 6: AI 배달 봇으로서의 Quarky - 1부3 Topics
-
수업 7: AI 배달 봇으로서의 Quarky - 2부4 Topics
-
수업 8: 나만의 폐기물 수집기 만들기 - 1부2 Topics
-
수업 9: 나만의 폐기물 수집기 만들기 - 2부3 Topics|1 Quiz
-
수업 10: 나만의 자율주행차 만들기5 Topics|1 Quiz
-
수업 11: 로봇 애완동물4 Topics
-
캡스톤 프로젝트수업 12: 캡스톤 프로젝트
Lesson 5, Topic 2
In Progress
활동 2: 단순화된 라인 팔로잉 로봇
Lesson Progress
0% Complete
간소화된 라인 팔로잉 로봇 – 개요
로봇을 따라가는 라인의 스크립트를 만드는 것이 번거롭다는 말에 동의하실 것입니다. 너무 많은 블록을 추가하고 매번 각 모터를 개별적으로 확인하는 등.
하지만 좋은 소식이 있습니다! PictoBlox에는 이전 스크립트에서 사용한 모든 블록을 대체할 로봇을 따라가는 라인을 만들기 위한 전용 블록이 있습니다. 그것들을 한번 봅시다!
코딩하자!
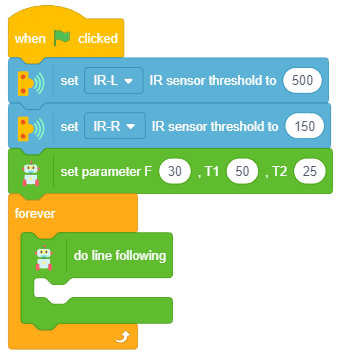
- 스크립팅 영역에 녹색 플래그 블록을 추가하고 () 블록에 두 개의 설정() IR 센서 임계값을 추가하고 왼쪽 및 오른쪽 IR 센서 임계값을 설정합니다.

- 로봇 팔레트로 이동하여 설정된 매개변수 F(), T1(), T2() 블록을 드래그 앤 드롭합니다. 지난 항목에서 확정한 매개변수를 설정합니다.

- 설정된 파라미터 F(), T1(), T2() 블록 아래에 무한 블록을 추가합니다.
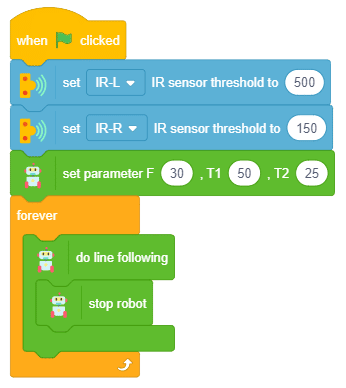
- 이제 로봇 팔레트에서 무한 블록 내부의 블록 다음 블록에 do 행 을 추가합니다. 이 블록은 이전 스크립트에서 개별적으로 확인해야 했던 조건을 따르는 모든 줄을 처리합니다.
- 다음으로 do line follow 블록 내부에 정지 로봇 블록을 추가합니다.
지금 진짜로 즐기세요!

검문소에서는 어떻게 되나요?
알다시피 로봇은 라인 팔로워 블록에서 체크포인트를 감지하고 해당 체크포인트에서 원하는 모든 작업을 수행할 수 있습니다. 이전 코드와 마찬가지로 로봇이 체크포인트에서 멈추도록 했습니다.
다음과 같이 로봇을 앞으로 나아가게 하여 중단 없이 트랙에서 움직이게 할 수 있습니다.

다음 수업에서 이 체크포인트를 다양한 방식으로 사용할 것입니다!
과제
다음 수업으로 넘어가기 전에 작은 과제가 기다리고 있습니다!
활동에서 생성한 프로젝트를 과제로 제출합니다.
과정을 마친 후 수료증을 받으려면 과제를 제출해야 합니다.
과제를 업로드하려면 아래 단계를 따르세요.
- 파일 선택 을 클릭합니다.
- 열리는 팝업 창에서 이미지를 선택합니다.
- 이미지가 선택되면 과제 업로드 를 클릭합니다.

허용되는 파일 유형은 PictoBlox 프로그램에서 생성된 SB3 입니다. 허용되는 최대 파일 크기는 15MB입니다.
행운을 빕니다!