
Lesson Progress
0% Complete
라인 팔로워 로봇 만들기 – 개요
우리는 이제 로봇이 무엇인지, 왜 유용한지 로봇에 대한 모든 것을 알고 있습니다. 자, 이제 우리만의 것을 만들 차례입니다!

먼저 트랙을 배치하고 논리를 이해한 다음 PictoBlox에서 스크립트를 만들어 실행을 지켜봅니다. 의 시작하자.
트랙 배치
트랙을 바닥에 놓습니다.
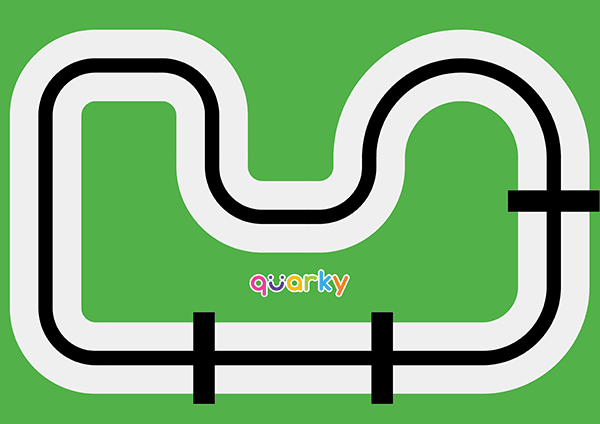
트랙에 3개의 수직선이 있는 것을 볼 수 있습니다. 다음 수업에서 이를 체크포인트로 사용할 것입니다.
논리 이해
라인 팔로우 로봇의 작동 논리는 간단합니다.
- 먼저 왼쪽 및 오른쪽 IR 센서 임계값을 설정합니다.
- 두 센서가 모두 활성화되면 로봇이 교차로에 있으므로 정지해야 함을 의미합니다.
- 왼쪽 센서만 활성화된 경우 로봇이 오른쪽으로 표류하고 있으며 다시 제자리로 가져와야 합니다. 따라서 약간 왼쪽으로 이동해야 합니다.
- 오른쪽 센서만 활성화되면 로봇이 왼쪽으로 표류하고 있음을 의미합니다. 따라서 약간 오른쪽으로 움직이게 해야 합니다.
- 센서 중 어느 것도 활성화되지 않은 경우 센서 사이에 검정색 선이 있고 로봇이 올바른 방향으로 가고 있음을 의미합니다. 그러므로 계속 앞으로 나아가야 한다.
- 2~5단계를 반복합니다.

로봇을 따라가는 라인에서 사용할 3가지 중요한 사항이 있습니다.
- F : 로봇이 검은색 선을 감지하지 못했을 때 로봇이 전진하는 속도.
- T1 & T2 : 로봇이 라인을 따라갈 때 센서 중 하나가 왼쪽 센서라고 하면 검은색 라인을 감지하면 로봇이 트랙을 벗어났고 트랙으로 돌아가려면 왼쪽으로 회전해야 합니다. 그리고 우리는 로봇을 왼쪽으로 돌리는 방법을 알고 있습니다. 왼쪽 모터는 뒤로 움직이고 오른쪽은 앞으로 움직입니다. 그러나 둘 다 같은 속도로 움직이면 로봇의 동작이 불안정해지고 비효율적이 됩니다. 따라서 우리는 T1과 T2를 선회하는 두 가지 속도를 가지게 됩니다.
- T1은 모터가 전진하는 속도이고
- T2는 모터가 뒤로 움직이는 속도입니다.
- 프로그래밍 중에 F, T1 및 T2를 설정하고 효과적인 라인 추적을 위해 이를 보정해야 합니다.
이제 이 논리를 기반으로 Quarky용 스크립트를 만들어 봅시다.
코딩하자!
IR 센서를 보정하는 동안 만든 이전 스크립트를 계속 진행하겠습니다.

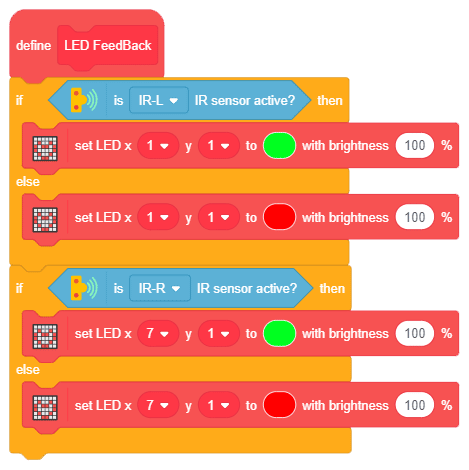
- My Blocks 팔레트로 이동하여 LED Feedback 이라는 블록을 만듭니다.

모자 블록과 스택 블록의 두 가지 유형의 블록이 생성됩니다.
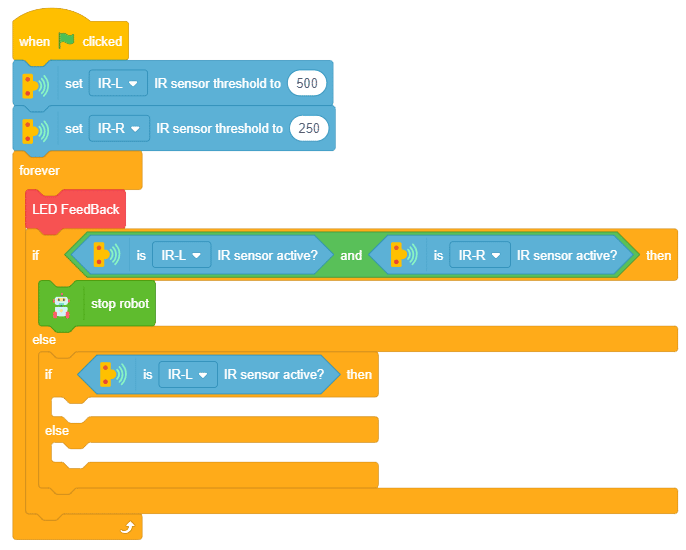
- 기존 스크립트에서 두 개의 if-else 블록을 LED 피드백 모자 블록 아래로 끌어다 놓습니다.
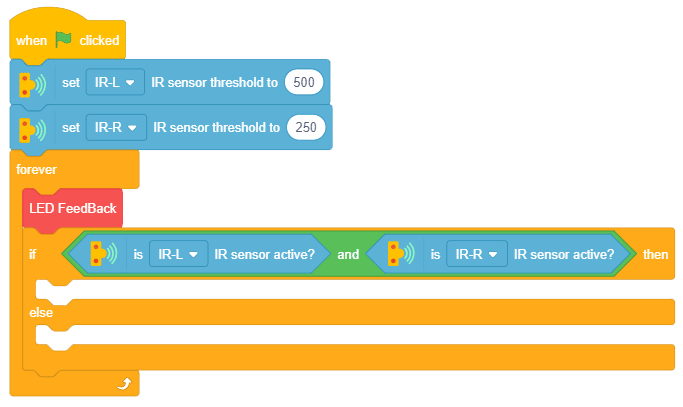
- 나머지 스크립트의 forever 블록 안에 LED 피드백 스택 블록을 배치합니다.
 참고: 조명과 같은 환경 요인이 수시로 변경되므로 IR 센서를 다시 보정하고 이에 따라 임계값을 업데이트해야 합니다.
참고: 조명과 같은 환경 요인이 수시로 변경되므로 IR 센서를 다시 보정하고 이에 따라 임계값을 업데이트해야 합니다.
- LED 피드백 스택 블록 아래에 if-else 블록을 추가합니다.
- 연산자 팔레트로 이동하여 블록의 흰색 다이아몬드 모양 공간 안에 () 및 () 블록을 놓습니다 . 이 블록은 두 조건이 모두 참인 경우에만 if 암 아래의 블록이 실행되도록 합니다.
- is () IR 센서를 추가합니까? () 및 () 블록의 첫 번째 및 두 번째 공백의 블록. 첫 번째 및 두 번째 블록에서 IR-L 및 IR-R 옵션을 선택합니다.
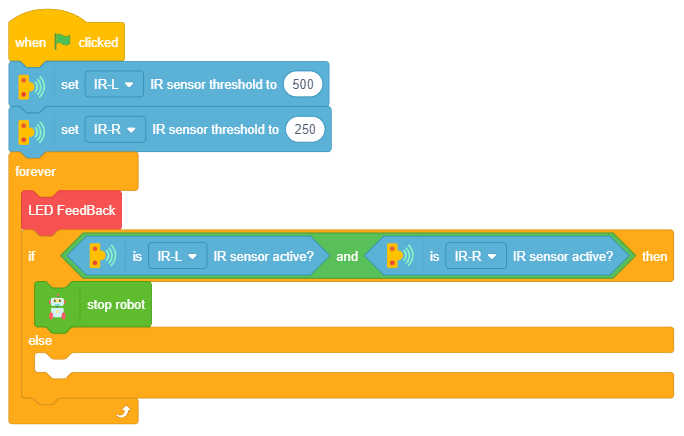
- 이제 이런 일이 발생하면 로봇이 멈추기를 원하므로 if 분기에 로봇 중지 블록을 추가하십시오.
- 첫 번째 if-else 블록의 else 암 아래에 또 다른 if-else 블록을 추가합니다.
- if 조건 추가 에서 () IR 센서가 활성입니까? 왼쪽 센서가 활성화되어 있는지 확인하려면 차단하고 IR-L 을 선택합니다.
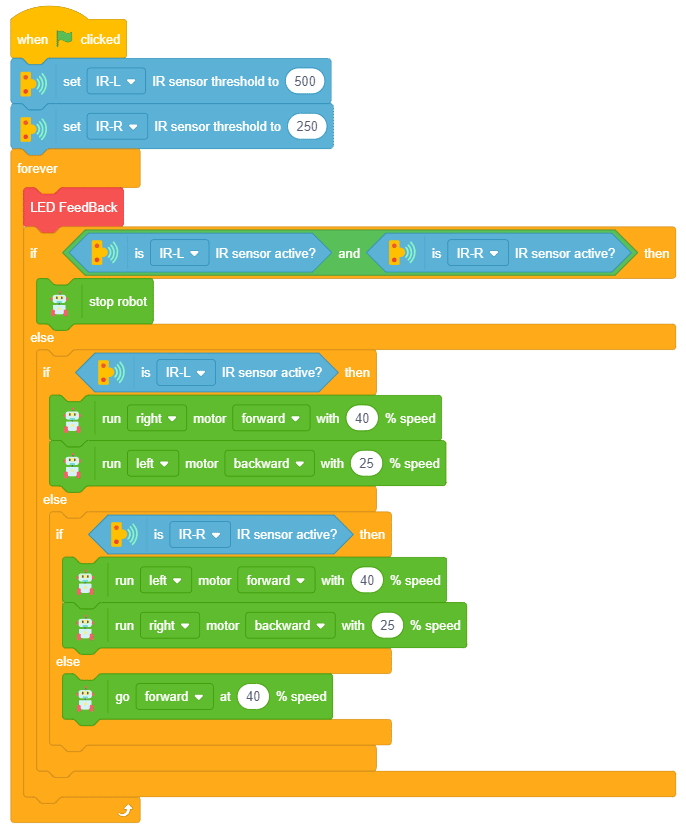
- 논리에 따르면 이 조건에서 Quarky를 약간 왼쪽으로 이동해야 합니다. 따라서 if 팔 아래에 () % 속도 블록이 있는 두 개의 실행() 모터()를 추가합니다. 첫 번째 블록에서 모터를 오른쪽 으로 변경하고 속도를 40%(T1)로 변경합니다.
- 왼쪽 모터의 두 번째 블록에서 방향을 뒤로 변경하고 속도를 25%(T2)로 줄입니다. 속도를 줄이면 모터가 제자리로 돌아올 수 있을 만큼만 약간만 왼쪽으로 이동합니다.

- 두 번째 if-else 블록의 else 암 아래에 또 다른 if-else 블록을 추가합니다.
- if 조건 추가 에서 () IR 센서가 활성입니까? 올바른 센서가 활성화되어 있는지 확인하려면 IR-R 을 차단하고 선택합니다.
- 논리에 따르면 이 조건에서 Quarky를 약간 오른쪽으로 이동해야 합니다. 따라서 if 팔 아래에 () % 속도 블록이 있는 두 개의 실행() 모터()를 추가합니다. 첫 번째 블록에서 모터를 왼쪽 으로 변경하고 속도를 40%(T1)로 변경합니다.
- 오른쪽 모터의 두 번째 블록에서 방향을 뒤로 변경하고 속도를 25%(T2)로 줄입니다. 속도를 줄이면 모터가 제자리로 돌아올 수 있을 만큼만 약간만 움직입니다.

- 다음으로, else 팔 아래 에 ()% 속도 블록에서 go()를 추가 하고 방향을 전진으로, 속도를 40%(F)로 선택 합니다.
 이제 로봇을 트랙에 놓고 녹색 깃발을 클릭하여 스크립트를 실행하십시오.
이제 로봇을 트랙에 놓고 녹색 깃발을 클릭하여 스크립트를 실행하십시오.
로봇 보정
로봇은 우리가 설정한 속도로 제대로 작동하지 않을 수 있습니다. 그것이 로봇의 보정이 들어오는 곳입니다.
우리는 로봇이 효율적으로 작동하도록 F, T1, T2 속도를 보정해야 합니다. 각 매개변수가 변경되면 어떻게 되는지 살펴보겠습니다.
- F : 로봇이 전진하는 속도를 제어합니다. 로봇이 오버슈팅하고 라인을 따르지 않으면 값을 줄입니다.

- T1 & T2 : 로봇이 제자리로 돌아오기 위해 얼마나 회전하는지 제어합니다. 값이 작으면 로봇이 궤도로 돌아갈 시간이 없을 수 있고 높으면 로봇이 많이 홱 움직입니다. 이 경우 로봇이 너무 많이 회전하는 것을 볼 수 있습니다. T2 속도를 0-20 사이로 유지하고 T1을 변경하여 가장 적절한 결과를 얻을 수 있습니다.
F, T1 및 T2 매개변수를 보정하고 다음 단원에서도 사용할 것임을 기억하십시오.