Back to Course
Quarky를 사용한 로보틱스 및 AI - 레벨 1
0% Complete
0/0 Steps
-
시작하기수업 1: 쿼키 로봇과 인사하세요!5 Topics|1 Quiz
-
로봇공학수업 2: 로봇과 함께하는 재미3 Topics|1 Quiz
-
수업 3: 무선 제어 로봇3 Topics
-
수업 4: 라인 추적 센서2 Topics
-
수업 5: 로봇을 따라가는 라인3 Topics|1 Quiz
-
현실 세계에서 활용 학습수업 6: AI 배달 봇으로서의 Quarky - 1부3 Topics
-
수업 7: AI 배달 봇으로서의 Quarky - 2부4 Topics
-
수업 8: 나만의 폐기물 수집기 만들기 - 1부2 Topics
-
수업 9: 나만의 폐기물 수집기 만들기 - 2부3 Topics|1 Quiz
-
수업 10: 나만의 자율주행차 만들기5 Topics|1 Quiz
-
수업 11: 로봇 애완동물4 Topics
-
캡스톤 프로젝트수업 12: 캡스톤 프로젝트
Lesson 2, Topic 3
In Progress
활동 2: 정사각형 만들기
Lesson Progress
0% Complete
쉿! 그것은 비밀.
소소한 꿀팁을 공유하는 시간!
위의 스크립트에서 볼 수 있듯이 Quarky가 움직이도록 하려면 각 모터에 대해 개별적으로 블록을 사용해야 했습니다. 하지만 물체를 인식하고 다른 항목을 수집하는 등 단순히 움직이는 것보다 훨씬 더 많은 작업을 수행하려면 어떻게 해야 할까요? 이 경우 스크립트가 거대해지고 추적하기 어려워집니다.
하지만 걱정하지 마세요! 해결책이 있습니다. 로봇 팔레트 에서 () 초 동안 () % 속도로 go() 라는 이름의 블록을 찾을 수 있습니다. 이 블록을 사용하면 매번 개별 모터에 블록을 사용하는 대신 전체 로봇이 전, 후, 좌, 우로 움직이도록 할 수 있습니다. 따라서 이 블록을 사용하여 스크립트를 다시 작성해 보겠습니다.
당신이 해야 할 일은 () 두 번째 블록에 대해 () % 속도에서 한 번의 이동()으로 각 이동 유형에 대해 두 실행() 모터()를 () 속도 블록으로 교체하는 것입니다. 그리고 끝났습니다! 꽤 멋지죠? 😉

매개변수를 변경하고 다른 방식으로 모터를 실행해 보십시오.
탐색할 시간입니다!
이제 여러분이 무언가를 시도해 볼 차례입니다. Quarky가 왼쪽으로 90° 회전하도록 해야 합니다.

요령은 시간을 맞추는 것입니다.

시간은 모든 사람에게 다를 것입니다. 그러니 우리와 같은 것을 얻지 못하더라도 걱정하지 마십시오.
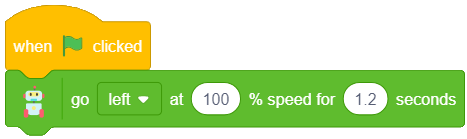
- 오버슈트: 시간이 더 많습니다. 값을 줄입니다.
- Undershoot: 당신의 시간은 적습니다. 그 가치를 높이십시오.
로봇과 놀기
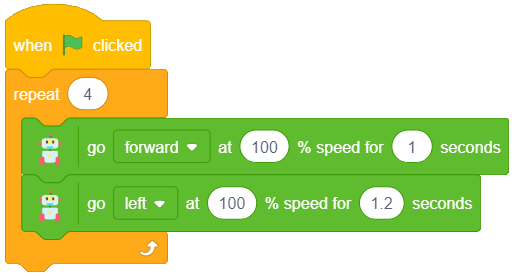
이제 로봇과 함께 즐거운 시간을 보낼 시간입니다! Quarky가 정사각형을 그리도록 합시다.

- 로봇 팔레트로 이동하여 () 초 블록에 대해 () % 속도로 이동()을 추가합니다. 움직임의 정방향, 100% 속도, 1초가 기본값으로 설정되어 있습니다.
- 그런 다음 () 두 번째 블록에 대해 () % 속도로 또 다른 이동()을 추가하고 방향을 왼쪽으로 변경합니다. 위에서 수행한 90° 왼쪽 운동 을 기억하십니까? 그 연습에서 얻은 것과 같은 선회 시간을 사용해야 합니다. 지금까지 Quarky는 앞으로 한 번만 왼쪽으로 이동하도록 했습니다. 정사각형을 만들려면 이 단계를 세 번 더 반복해야 합니다.
- 컨트롤 팔레트에서 반복() 블록을 추가하고 빈칸에 4 를 씁니다. 이는 repeat() 블록 내부의 모든 블록이 4번 실행됨을 의미합니다.
- repeat () 블록 내부의 () 초 블록에 대해 () % 속도로 go()를 모두 추가합니다.
- 상단에 when flag clicked 블록을 추가하여 스크립트를 완성합니다.
- 이제 녹색 플래그를 클릭하여 스크립트를 실행하십시오!