
Back to Course
Quarky를 사용한 로보틱스 및 AI - 레벨 1
0% Complete
0/0 Steps
-
시작하기수업 1: 쿼키 로봇과 인사하세요!5 Topics|1 Quiz
-
로봇공학수업 2: 로봇과 함께하는 재미3 Topics|1 Quiz
-
수업 3: 무선 제어 로봇3 Topics
-
수업 4: 라인 추적 센서2 Topics
-
수업 5: 로봇을 따라가는 라인3 Topics|1 Quiz
-
현실 세계에서 활용 학습수업 6: AI 배달 봇으로서의 Quarky - 1부3 Topics
-
수업 7: AI 배달 봇으로서의 Quarky - 2부4 Topics
-
수업 8: 나만의 폐기물 수집기 만들기 - 1부2 Topics
-
수업 9: 나만의 폐기물 수집기 만들기 - 2부3 Topics|1 Quiz
-
수업 10: 나만의 자율주행차 만들기5 Topics|1 Quiz
-
수업 11: 로봇 애완동물4 Topics
-
캡스톤 프로젝트수업 12: 캡스톤 프로젝트
Lesson 11, Topic 2
In Progress
활동 1: 손 감지 시스템 만들기
Lesson Progress
0% Complete
이 레슨에서는 Quarky가 손을 감지하도록 만들 것입니다.
IR 센서
IR 센서를 이해합시다. 적외선(IR) 센서는 주변 환경에서 적외선을 측정하고 감지하는 전자 장치입니다. IR은 사람의 눈에는 보이지 않습니다.
Quarky에는 2개의 IR 센서가 있습니다.
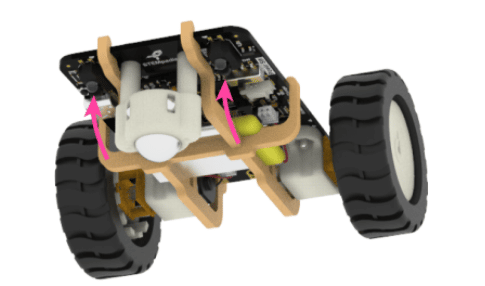
그들이 어떻게 작동하는지 이해합시다.
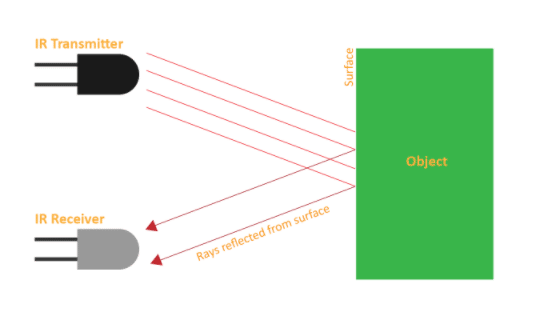
IR 센서는 2개의 LED로 구성됩니다. 하나는 IR 빛을 전송하고 다른 하나는 IR 빛을 수신합니다. IR 광선이 전송되면 가장 가까운 표면에서 반사되어 수신기 LED로 돌아갑니다. 이것이 IR 센서가 물체를 감지하는 방식입니다.
그 값을 기반으로 PictoBlox에서 센서 값을 얻을 수 있습니다. 장애물이 있는지 여부를 추정할 수 있습니다.
- 센서가 아무것도 감지하지 못하면 출력 값이 증가합니다. 이는 센서가 활성 상태임을 의미합니다.
- 장애물을 감지하면 출력 값이 감소합니다. 이는 센서가 비활성 상태임을 의미합니다.
먼저 IR 센서를 보정해야 합니다. 즉, 제대로 작동하는지 확인해야 합니다. 이를 위해 PictoBlox에서 스크립트를 만들어 보정합니다.

IR 센서는 햇빛에서 작동 하지 않습니다 . 태양의 IR 광선은 센서의 전체 임계값을 증가시킵니다. 따라서 그들은 항상 활성 상태를 유지합니다. 폐쇄된 환경 또는 야간은 로봇을 따라가는 라인과 함께 작업할 장소/시간입니다.
코딩하자!
임계값 찾기
- 파일에서 새로 만들기를 선택하여 새 프로젝트를 엽니다.
- Quarky를 PictoBlox에 연결합니다.
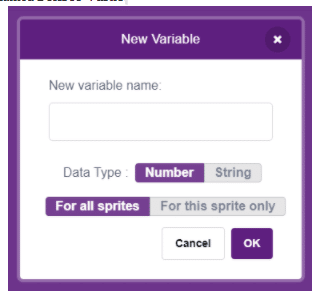
- 변수 팔레트로 이동하여 L 및 R 이라는 두 개의 변수를 만듭니다.
- 다음으로 변수 값을 좌우 IR 센서 값으로 업데이트하는 스크립트를 작성합니다.
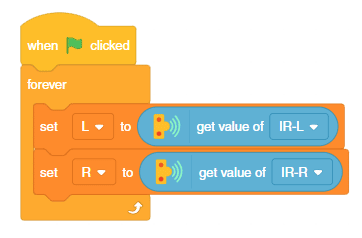
- 스테이지의 왼쪽 상단 모서리에 나타납니다. 변수를 사용하여 IR 센서의 임계값을 결정합니다.

- 로봇 앞에 장애물이 없을 때 왼쪽 및 오른쪽 IR 센서의 값을 기록하십시오. 예를 들어, 위의 경우:
- L_높음 = 4095
- R_높음 = 4095
- 로봇 앞에 손을 대면 왼쪽 및 오른쪽 IR 센서의 값에 유의하십시오.
- L_Low = 1700
- R_Low = 2200
- 다음으로 평균을 구하여 임계값을 구합니다.
- L_T = (L_고가 + L_저가)/2 = 2897
- R_T = (R_고가 + R_저가)/2 = 3147
이 값을 기억하십시오.
LED를 통해 피드백 받기
이제 센서에 대해 값이 제대로 작동하는지 확인하기 위해 센서가 검은색 선을 감지했음을 나타내는 피드백 루프를 추가해 보겠습니다.
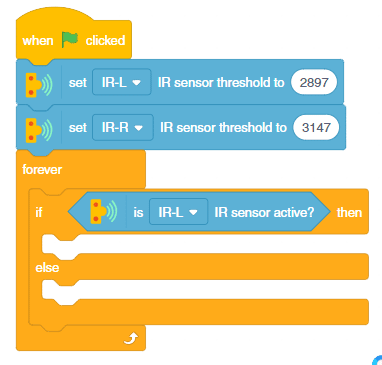
- 이벤트 팔레트에서 깃발을 클릭했을 때 블록을 추가합니다.
- 센서 팔레트로 이동하여 두 개의 설정된 () IR 센서 임계값을 () 블록에 추가하고 위에서 찾은 임계값을 씁니다.

- 다음으로 Control 팔레트에서 무한 블록을 추가합니다. 센서가 라인을 지속적으로 감지하는지 확인하기 위해 이 블록을 사용하고 있습니다.
- 그런 다음 if-else 블록을 forever 블록 안에 추가합니다.
- 다음으로 센서 팔레트로 이동하여 is () IR sensor active? 를 추가합니다. if-else 블록의 공백 내부 블록. IR 센서는 검정색 선을 감지하면 활성화됩니다. 이는 해당 값이 임계값보다 커야 함을 의미합니다. 이 블록은 기본적으로 센서 값이 임계값보다 큰지 확인합니다.
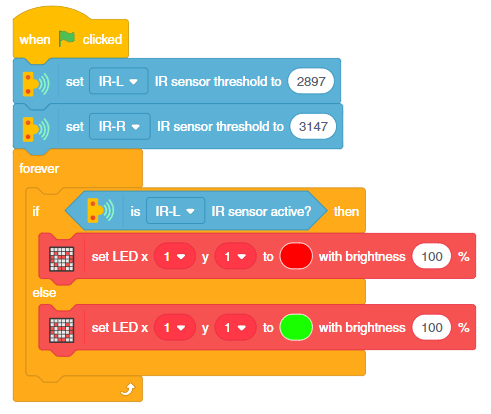
- 센서가 활성화되었음을 나타내기 위해 도트 매트릭스의 LED 중 하나를 켭니다. 디스플레이 팔레트에서 if-else 블록의 if 암 아래에 밝기() 블록이 있는 ()에 설정된 LED x () y ()를 추가합니다. 블록의 색상 원을 클릭하여 드롭다운에서 색상을 RED 로 설정합니다.
- 블록을 복제하여 if-else 블록의 else 팔 아래에 놓습니다. 색상을 GREEN 으로 설정하십시오.
- if 블록을 복제하고 센서를 IR-R로 변경합니다.
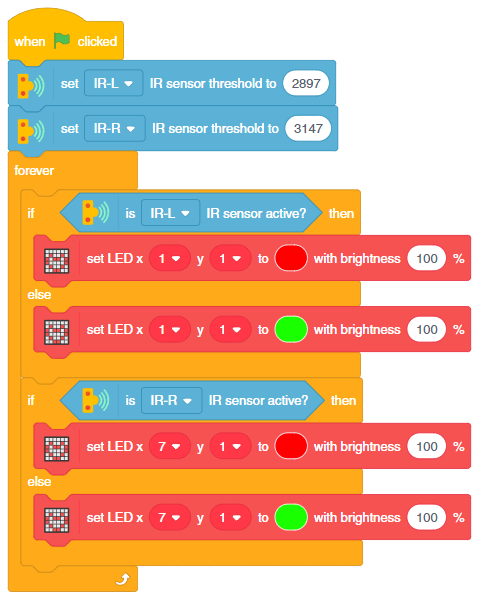
프로그램을 실행하고 코드를 테스트합니다.