
Back to Course
Quarky를 사용한 로보틱스 및 AI - 레벨 1
0% Complete
0/0 Steps
-
시작하기수업 1: 쿼키 로봇과 인사하세요!5 Topics|1 Quiz
-
로봇공학수업 2: 로봇과 함께하는 재미3 Topics|1 Quiz
-
수업 3: 무선 제어 로봇3 Topics
-
수업 4: 라인 추적 센서2 Topics
-
수업 5: 로봇을 따라가는 라인3 Topics|1 Quiz
-
현실 세계에서 활용 학습수업 6: AI 배달 봇으로서의 Quarky - 1부3 Topics
-
수업 7: AI 배달 봇으로서의 Quarky - 2부4 Topics
-
수업 8: 나만의 폐기물 수집기 만들기 - 1부2 Topics
-
수업 9: 나만의 폐기물 수집기 만들기 - 2부3 Topics|1 Quiz
-
수업 10: 나만의 자율주행차 만들기5 Topics|1 Quiz
-
수업 11: 로봇 애완동물4 Topics
-
캡스톤 프로젝트수업 12: 캡스톤 프로젝트
Lesson 10, Topic 3
In Progress
활동 2: 자율주행차 만들기
Lesson Progress
0% Complete
자율주행차 만들기 – 개요
자율주행차를 위한 코드를 작성할 시간입니다. 자동차는 경로에 있는 표지판과 랜드마크를 인식하고 그에 따라 조치를 취해야 합니다.
- 사인하기 – 앞으로
- 좌회전 표지판 – 좌회전
- 우회전 표지판 – 우회전
- 유턴 표지판 – 뒤로

스크립트 완성
이제 Quarky를 자율주행차로 변신시키는 스크립트를 완성해 봅시다!
- 이전 항목에서 만든 스크립트부터 시작하겠습니다.
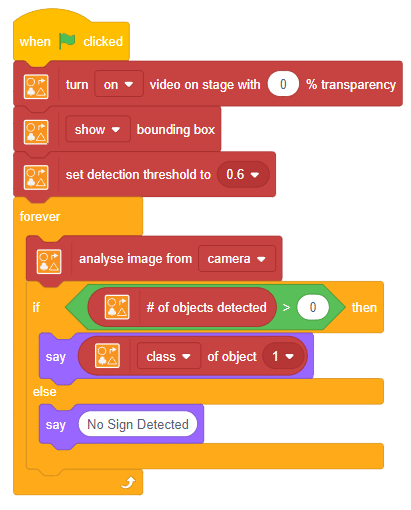
- if-else 블록을 if 블록으로 교체하십시오. 같은 조건을 추가합니다.

- if 블록 안에 if 블록을 추가합니다. 우리가 넣을 조건은 개체 클래스가 GO입니까?
- 추가 () 포함()? if 블록 조건에서 Operators 확장의 블록.
- ( ) contains ()? 차단하다. 매개변수를 class 로 선택하십시오. 두 번째 공간에 ” 이동 “을 추가합니다.
- 로봇 확장에서 () 초 동안 () % 속도로 이동()을 추가합니다. 방향을 Forward 로, 속도를 60%로, 시간을 0.5초로 선택합니다.

- 다음 조건에 대해 if 블록을 세 번 복제합니다.
- 좌회전 – 방향을 왼쪽 으로, 속도를 40%로, 시간을 0.5초로 선택합니다.
- 우회전 – 방향을 오른쪽 으로, 속도를 40%로, 시간을 0.5초로 선택합니다.
- 유턴 – 방향을 뒤로 , 속도를 60%, 시간을 0.5초로 선택합니다.

녹색 플래그를 클릭하여 스크립트를 실행합니다.
표지판과 랜드마크를 배치하고 자동차가 스스로 운전하게 하여 나만의 도시를 만드세요.
과제
다음 수업으로 넘어가기 전에 작은 과제가 기다리고 있습니다!
활동에서 생성한 프로젝트를 과제로 제출합니다.
과정을 마친 후 수료증을 받으려면 과제를 제출해야 합니다.
과제를 업로드하려면 아래 단계를 따르세요.
- 파일 선택 을 클릭합니다.
- 열리는 팝업 창에서 이미지를 선택합니다.
- 이미지가 선택되면 과제 업로드 를 클릭합니다.

허용되는 파일 유형은 PictoBlox 프로그램에서 생성된 SB3 입니다. 허용되는 최대 파일 크기는 15MB입니다.
행운을 빕니다!