
Back to Course
Quarky 및 파이썬을 사용한 로봇 공학 및 AI - 레벨 1
0% Complete
0/0 Steps
-
로봇 공학의 기초수업 1: Quarky 로봇의 기초5 Topics
-
수업 2: 로봇 동작의 기초3 Topics
-
수업 3: 무선 제어 로봇4 Topics
-
라인 팔로워수업 4: 라인 감지를 위한 IR 센서 보정3 Topics
-
수업 5: 로봇을 따라가는 라인4 Topics
-
로봇 공학을 이용한 AI수업 6: AI 배달 봇으로서의 Quarky - 파트 13 Topics
-
수업 7: AI 배달 봇으로서의 Quarky - 파트 24 Topics
-
수업 8: 자율주행차 - 파트 14 Topics
-
수업 9: 로봇 애완동물4 Topics
-
수업 10: 제스처 기반 로봇 제어 - 1부3 Topics
-
수업 11: 제스처 기반 로봇 제어 - 파트 23 Topics
-
캡스톤 프로젝트수업 12: 캡스톤 프로젝트
Lesson 4, Topic 1
In Progress
IR 센서의 기초
Lesson Progress
0% Complete
논리 이해
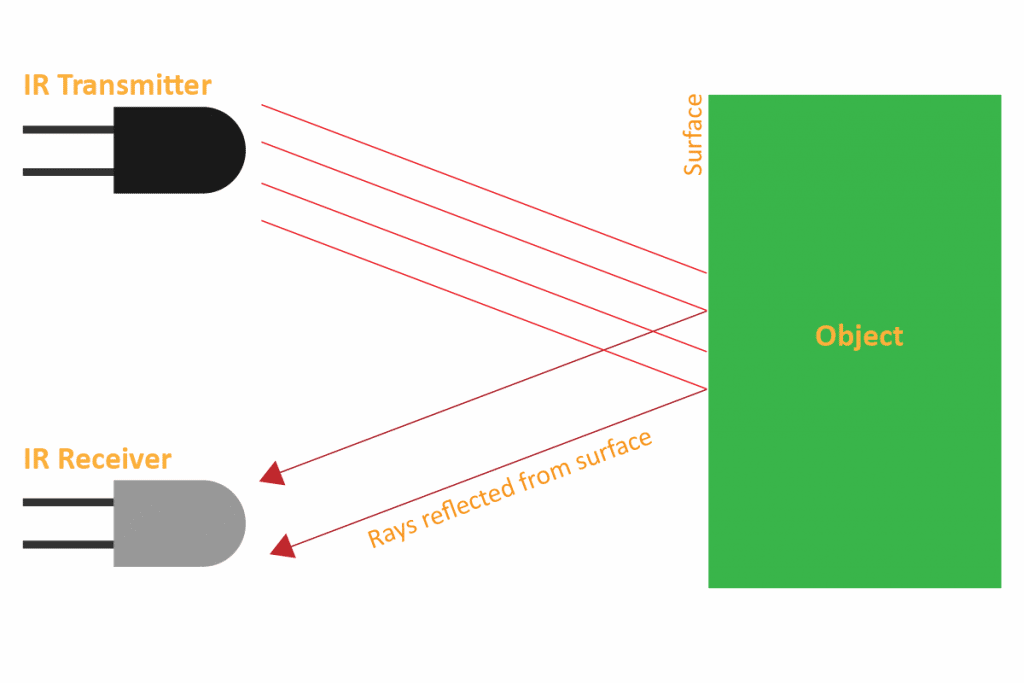
IR 센서는 2개의 LED로 구성됩니다. 하나는 IR 빛을 전송하고 다른 하나는 IR 빛을 수신합니다. IR 광선이 전송되면 가장 가까운 표면에서 반사되어 수신기 LED로 돌아갑니다. 이것이 IR 센서가 물체를 감지하는 방식입니다.
그러나 색상을 감지하려면 표면이 반사하는 광선의 수에 따라 달라집니다.
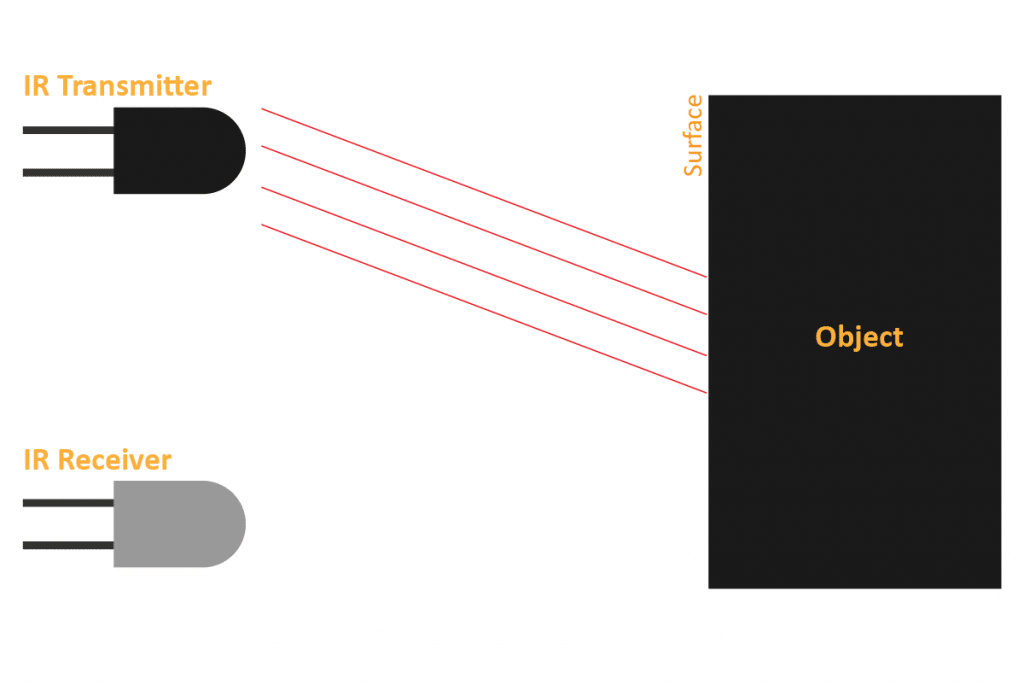
- 어두운 표면은 더 많은 IR 광선을 흡수하므로 결과적으로 수신기는 더 적은 IR 광선을 받습니다.
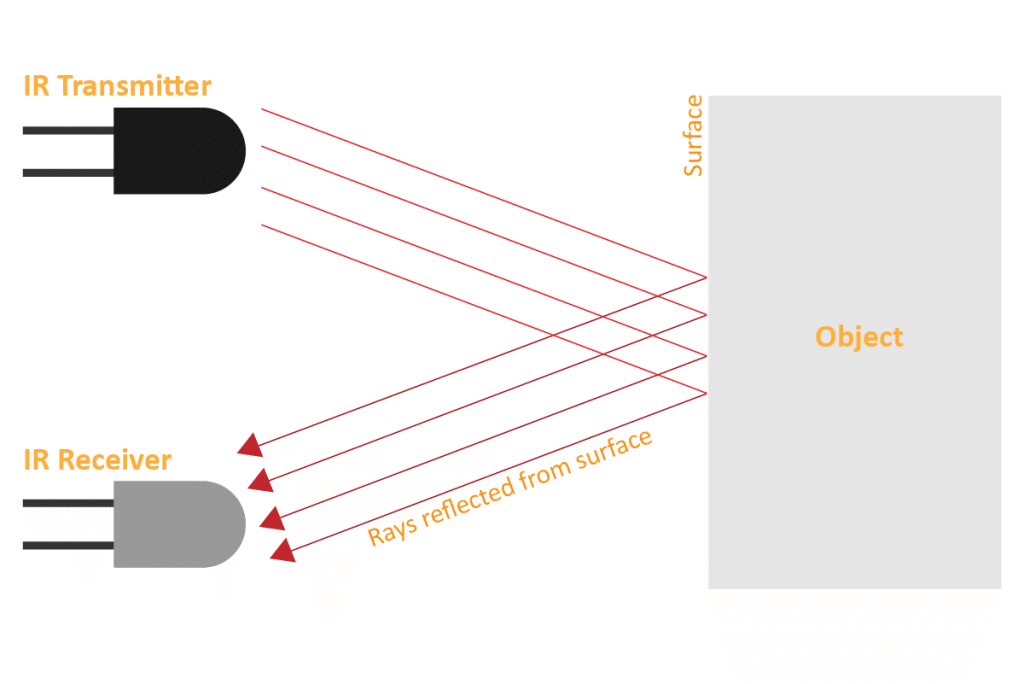
- 흰색 또는 반짝이는 물체는 IR 광선을 덜 흡수하므로 수신기는 더 많은 IR 광선을 받게 됩니다.
PictoBlox에서 센서 값을 얻을 수 있으며 해당 값을 기반으로 표면이 검은색인지 흰색인지 추정할 수 있습니다.
- 센서가 흑선을 감지하면 출력값이 증가합니다. 이는 센서가 활성 상태임을 의미합니다.
- 흰색 영역을 감지하면 출력 값이 감소합니다. 이는 센서가 비활성 상태임을 의미합니다.
센서가 검은색 선을 감지하는 임계값을 호출합니다. 센서 값이 임계값보다 작으면 센서가 아직 라인을 감지하지 못했다는 의미입니다.
로봇을 따라가는 라인을 사용하기 전에 먼저 IR 센서를 보정해야 합니다. 즉, 제대로 작동하는지 확인해야 합니다. 이를 위해 PictoBlox에서 스크립트를 만들어 보정합니다. Quarky를 PictoBlox에 연결하고 IR 센서의 임계값을 찾습니다.

IR 센서는 햇빛에서 작동하지 않습니다 . 태양의 IR 광선은 센서의 전체 임계값을 증가시키므로 센서는 항상 활성 상태를 유지합니다. 폐쇄된 환경 또는 야간은 로봇을 따라가는 라인과 함께 작업할 장소/시간입니다.